细粒度图像识别研究背景:基于PSO-RBF神经网络的示功图识别
细粒度图像识别研究背景:基于PSO-RBF神经网络的示功图识别示功图是抽油机悬点载荷随其位移变化规律的图形。它是示功仪在抽油机一个抽吸周期内测取的封闭曲线。其纵坐标是抽油机的悬点载荷W,横坐标是抽油机的冲程S,利用动力仪对实际抽油井进行实测得出。1傅里叶描述子提取示功图及样本预处理石油资源已经成为人类赖以生存和发展的物质基础,在国民经济中占据极其重要的战略地位[1]。其中应用最广泛的有杆抽油机[2]的抽油泵需要深入地层几百米到几千米,工作环境极其恶劣,它既受到自身机械设备的影响,又受到周围砂、水、气、蜡的影响,随时可能出现各种不稳定现象,影响抽油机的正常工作,进而导致油田减产、甚至设备损坏。因此,在采油过程中,实现油井的实时工作状态监测、智能故障诊断,及时发现和处理问题,不但可以提高油田的生产量,还可以延长抽油设备的使用期限。抽油机故障诊断从最初的“五指动力仪”分析法[2]、“光杆动力仪”分析法[2]、“井下动力仪”分析法[3],到1966年美国Sh
任毅飞, 侯勇
滨海新区大港油田第一中学,天津 300280
摘要:针对广泛应用的有杆抽油机故障率较高的现状,提出傅立叶描述子和RBF神经网络相结合的算法判断抽油机工况。该算法基于典型示功图的几何特征,提取低频区傅里叶描述子作为特征参数,再结合上、下冲程的载荷变化量,构成代表对应工况的12个综合特征参数,利用RBF神经网络建立识别网络模型,对数据进行网络训练得到RBF神经网络。通过MATLAB仿真平台完成了PSORBF神经网络的示功图识别的仿真验证,实际运用在油田生产中准确性良好。
0引言
石油资源已经成为人类赖以生存和发展的物质基础,在国民经济中占据极其重要的战略地位[1]。其中应用最广泛的有杆抽油机[2]的抽油泵需要深入地层几百米到几千米,工作环境极其恶劣,它既受到自身机械设备的影响,又受到周围砂、水、气、蜡的影响,随时可能出现各种不稳定现象,影响抽油机的正常工作,进而导致油田减产、甚至设备损坏。因此,在采油过程中,实现油井的实时工作状态监测、智能故障诊断,及时发现和处理问题,不但可以提高油田的生产量,还可以延长抽油设备的使用期限。
抽油机故障诊断从最初的“五指动力仪”分析法[2]、“光杆动力仪”分析法[2]、“井下动力仪”分析法[3],到1966年美国Shell公司的S.G.Gibbs建立的将地面悬点示功图转换为井下泵示功图的阻尼波动方程,并同A.B.Neely一起提出有杆抽油系统的计算机诊断技术[45],很大程度上提高了产油量。但此种方法需要依靠经验丰富的技术人员,具有很强的主观性。1988年H.J.Derek[6]通过大量资料收集和数据分析,提出有杆式抽油机故障诊断专家系统,通过建立数学模型把实测地面示功图转换为井下泵示功图,进行故障类型判断,随后经过更多的技术引入,可以判断的故障类型更加齐全。
本文利用傅里叶描述子方法提取典型示功图的特征,结合上、下冲程的载荷变化量,组成代表工况的综合特征参数;然后建立基于改进粒子群优化的RBF神经网络模型,训练后实现示功图智能识别,最后总结分析仿真结果。
1傅里叶描述子提取示功图及样本预处理
示功图是抽油机悬点载荷随其位移变化规律的图形。它是示功仪在抽油机一个抽吸周期内测取的封闭曲线。其纵坐标是抽油机的悬点载荷W,横坐标是抽油机的冲程S,利用动力仪对实际抽油井进行实测得出。
傅里叶描述子提取图形特征方法的基本思想是把二维问题降为一维问题处理,就是对物体的轮廓坐标序列作傅里叶变换,其中低频系数表征物体的大致形状,高频系数表征物体的精确形状,只需要截取表征大致形状的低频系数,就可以作为图形识别的判断依据。截取低频区前P个傅里叶描述子,并对其求傅里叶反变换,恢复出原始图形的大致形状,通过试验发现在P=10时既可以辨别出大致轮廓,也没有包含冗余的细节信息。因此,选择P=10作为示功图提取的傅里叶描述子数目。
综合特征参数,有:
其中,ΔF1表示上冲程载荷变化量[7];Fsmax为实测示功图上冲程中的最大载荷;Fmax为理论示功图的上冲程的最大载荷。
其中 ΔF2为下冲程载荷变化量;Fsmin为实测示功图下冲程中的最小载荷;Fmin为理论示功图的下冲程的最小载荷。
把傅里叶描述子方法提取得到的示功图图形特征参数和描述载荷变化的特征参数ΔF1、ΔF2组合成为分类综合特征参数C=[c1、c2、c3、c4、c5、c6、c7、c8、c9、c10、c11、c12]。本文收集130组示功图,包含13种工况:供液不足、连抽带喷、柱塞脱出泵筒、油井出砂、抽油杆脱落、泵上碰、泵下碰、油管漏失、气体影响(气锁)、游动凡尔漏失、固定凡尔漏失、双凡尔漏失、工况正常,每种工况10组。用上述方法提取综合特征参数建立训练样本数据集。为了避免样本不同量纲或不易权衡的物理意义,需把样本数据值范围归一化到[0 1]区间。
2粒子群优化的RBF神经网络
2.1RBF神经网络模型
RBF神经网络[8]只包括三层,即输入层、隐含层(径向基函数层)、输出层,网络结构如图1。

输入输出关系:
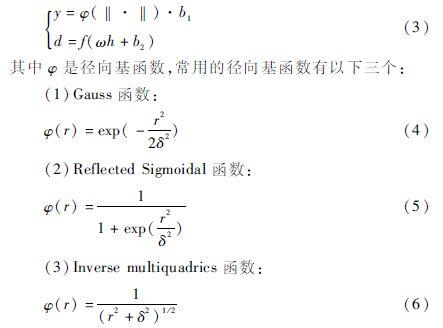
其中,δ为径向基函数的扩展常数或宽度,δ越小,就越具有选择性,也就是说隐含层的径向基网络只响应靠近中央位置的输入权值,即局部响应。
2.2RBF神经网络的设计
RBF神经网络包括结构设计和参数设计。结构设计就是确定径向基函数数据中心的数目,即隐含层节点数;参数设计一般考虑径向基函数数据中心的位置和扩展常数,以及输出层的权值。参数确定的过程分成两阶段:第一阶段是无监督的自组织学习,全部输入样本进行自组织聚类,为隐节点的径向基函数确定合适的数据中心和扩展常数;第二阶段是有监督的学习,根据前一阶段的学习,用合适的监督学习算法确定隐含层到输出层的权值。
(1)基函数数据中心的数目
正则化的RBF网络,基函数数据中心的个数即是样本数,基函数的数据中心的位置即是样本数据本身;广义RBF网络的隐节点数需要在网络建立中尝试而得,Chiu[910]提出的减聚类是相对有效的一种确定径向基函数数据中心数目的方法。
首先计算每个样本数据的密度值,值越大表示这个样本附近的其他样本数目越多,公式如下:
其中,α=4/γ2a,γα∈R ,γα是xi的一个领域半径。
找出最大密度值记为Dc1,对应的样本记为xc1,作为第一个聚类中心。然后进行样本数据的密度值更新,更新公式为:
然后找出更新之后的最大密度值记为Dc2,对应的样本记为xc2,作为第二个聚类中心。接着将Dc2代替Dc1,xc2代替xc1,根据式(8)再次对样本数据的密度值进行更新,用式(7)寻找下一个聚类中心,直到Dc(i-1)<εDc1(ε∈(0 1)),终止循环,最终得到的聚类中心个数就是径向基函数数据中心个数,即隐含节点数。
(2)基函数数据中心的位置、扩展常数和输出权值
数据中心位置的选取可分为随机选取法和动态调解法,随机选取法就是在输入样本中随机地选出数据中心的位置,此时基函数的扩展常数一般设定为:
其中,dmax表示随机选取的数据中心之间的最大距离,M表示数据中心的个数。
动态调解法常采用各种动态聚类算法对中心进行自组织选择,依据数据点之间的距离,选取高密度指标的数据点作为中心,再根据中心之间的距离确定扩展常数。
除此之外,还可以采用有监督学习来确定中心,常采用简单有效的梯度下降法,目标函数定义为:
其中,P为训练样本数,ei是第i个输入样本的误差,Xi是第i个输入样本,cj是选取的第j个数据中心。
为了最小化目标函数E,各个参数按其负梯度方向进行修正。

2.3PSORBF网络参数确定
经过多次试验,PSORBF神经网络各参数设定为:
减聚类算法参数:ga=1.4;r=0.7;e=0.01。
RBF神经网络参数:学习率η=0.1;目标误差goal=0.001;迭代次数Num=2 000。
粒子群算法参数:种群规模N=40;c1s=2.5,c2s=0.5,c1e=0.5,c2e=2.5;ωstart=0.9,ωend=0.4,k=0.9;最大飞行速度vmax=0.2;适应度阈值ε=0.001;最大允许迭代次数Tmax=1 000;随机变异概率r=0.85。

图2PSORBF最佳适应值按上述参数仿真得到的最佳适应度函数值曲线如图2所示。从图中可以看出,粒子群算法在迭代729次之后收敛,适应度值达到设定的阈值要求,说明此时PSORBF神经网络模型的训练精度已经比较高,可以用来进行示功图识别。
3PSO_RBF网络识别验证
为检验PSORBF神经网络的识别能力,在训练样本中随机选取20组数据 利用训练完成的神经网络对数据进行识别验证,得到的识别结果如表1。表1训练样本测试结果类型总数正确识别数正确识别率/%训练样本2020100
表1显示PSORBF神经网络对训练样本的识别能力非常好,20组样本数据的识别正确率达到100%。
为进一步检验PSORBF神经网络的泛化能力,随机选取6组示功图,包括油井出砂、工况正常、气体影响、双凡尔漏失、柱塞脱出泵筒、供液不足。如图3所示。

以相同的方法提取得到图3中6组示功图的综合特征参数,并归一化到[0 1]区间,如表2,作为PSORBF神经网络的输入。

调用训练完成的PSORBF神经网络,将表2中提取的综合特征参数输入网络,进行识别仿真验证,测试输出结果如表3。

从表3的测试结果可以看出,PSORBF网络对示功图的识别具有较好的辨别能力,样本识别的正确率达到100%,泛化识别的正确率达到了83%。随机选取的6个测试示功图中识别错误1个,把气体影响识别成了供液不足,测试输出结果显示对应供液不足输出值0.75,对应气体影响输出值0.45,竞争结果为供液不足。从图形轮廓可以看出,这两种示功图形状十分相近,都呈现出刀把状,并且测试的气体影响示功图抖动非常严重,对综合特征参数也有一定的影响。
4结论
本文提出了一种利用PSO-RBF神经网络实现示功图识别的方法。该方法首先利用傅里叶描述子方法提取得到典型示功图图形的特征参数,并结合上、下冲程载荷变化量,组成综合特征参数样本集。然后利用RBF神经网络建立网络模型,对数据进行训练。通过对20组样本数据进行网络识别验证,验证PSORBF神经网络识别示功图的有效性,其正确率达100%,通过对6组测试数据进行验证,其正确率达83%。本文算法提取的是具有代表性的单一故障示功图图形特征,并未考虑多故障同时识别及设备和生产参数对故障的影响,复杂工况识别将作为后续研究方向进一步开展。图3随机选取的6组示功图
参考文献
[1] 王琼. 基于优化理论的神经网络研究及在抽油机故障诊断中的应用[D]. 大庆:东北石油大学 2011.
[2] 孙文莉. 有杆抽油系统故障智能诊断及其应用研究[D]. 西安:西安石油大学 2011.
[3] 孙振华. 游梁式抽油机采油系统实时评价方法研究[D]. 北京:中国石油大学 2011.
[4] GIBBS S G NEELY A B. Computer diagnosis of downhole conditions in sucker rod pumping wells[J]. Journal of Petroleum Technology 1966 18(1): 9198.
[5] GIBBS S G. Method of determining sucker rod pump performance: U.S. Patent 3 343 409[P]. 1967926.
[6] DEREK H J. Sucker rod pumping unit diagnostics using an expert system[D]. State of Texas USA: Texas A & M University 1988.
[7] 王科科. 远程监测抽油机井工况智能诊断技术[D]. 北京:中国石油大学 2009.
[8] Haykin S. 神经网络原理[M]. 叶世伟 史忠植,译. 北京:机械工业出版社, 2004.
[9] CHIU S L. Fuzzy model identification based on cluster estimation[J]. Journal of Intelligent and Fuzzy System 1994 2(3):12401245.
[10] Man Chuntao Yang Xu Zhang Liyong. A new learning algorithm for RBF neural networks[C]. In Systems



